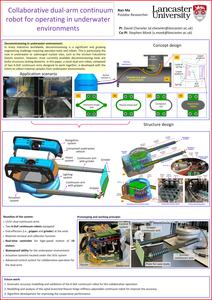
Ma, Nan and Monk, Stephen and Cheneler, David (2022) Collaborative dual-arm continuum robot for operating in underwater environments. In: UKRAS22: The 5th UK Robotics and Autonomous Systems Conference, 2022-08-26, Aberystwyth University.
![[thumbnail of Poster for UKRAS22]](https://eprints.lancs.ac.uk/175223/1/Poster_for_UKRAS22.jpg)
Poster_for_UKRAS22.jpg - Submitted Version
Available under License Creative Commons Attribution-NoDerivs.
Download (2MB) | Preview
{kind=link}
{kind=link}
Abstract
In many industries worldwide, decommissioning is a significant and growing engineering challenge requiring specialist tools and robots. This is particularly the case in underwater or submerged nuclear sites, such as the stricken Fukushima Daiichi reactors. However, most currently available decommissioning tools are bulky structures lacking dexterity. In this paper, a novel dual-arm robot, composed of two 6-DoF continuum arms designed to work together, is developed with the intent to collect material samples from underwater environments.